Robotica biomedica

 BIOROBOTICA
BIOROBOTICA
Covid-19: la robotica può diventare il mezzo per lo sviluppo di soluzioni in grado di fornire risposte concrete per contrastare l’emergenza sanitaria e sociale derivante da eventi pandemici
30.03.2020
Testo dell’articolo
In questo contesto, alcune risposte arrivano dallo studio COVID-19 — The role of robotics in managing public health and infectious diseases pubblicato come Editoriale sulla rivista Science Robotics che propone una nuova prospettiva. Tredici studiosi di robotica di fama internazionale – tra i quali il Prof. Paolo Dario, docente dell’Istituto di BioRobotica della Scuola Superiore Sant’Anna di Pisa e delegato della rettrice Sabina Nuti alla terza missione – spiegano come la robotica può combattere non soltanto il Covid-19, ma anche altri virus (ed emergenze) che potrebbero ripresentarsi in un futuro anche non lontano.
In frangenti complessi come quelli di un’epidemia, la robotica può rivelarsi utilissima in almeno tre ambiti strategici: assistenza clinica (per esempio, nella telemedicina e nella decontaminazione); logistica (per esempio, nella gestione dei rifiuti, anche contaminati), sicurezza (per esempio, per il controllo su chi è chiamato a rispettare le quarantene volontarie). La pandemia dovuta al Covid-19 ne ha introdotto un altro: la continuità del lavoro e il mantenimento delle funzioni sociali ed economiche anche in situazioni di grave emergenza.
Per ognuno di questi ambiti, la robotica offre soluzioni innovative. Se ci si concentra per esempio, sul primo ambito, l’assistenza clinica, che appare il problema più stringente in questo periodo, la robotica può intervenire in aree specifiche quali la prevenzione, la diagnosi e lo screening, oltre che nella cura del paziente.
Nei giorni dell’epidemia, è palese lo sforzo esemplare di medici, infermieri e operatori sanitari impegnati in prima linea nel contrastare l’emergenza e che spesso sono costretti a lavorare senza adeguate misure di sicurezza. Questa situazione comporta il rischio, purtroppo confermato dai fatti, di contagio e di ulteriore diffusione del virus. La presenza di sistemi robotici in supporto agli operatori umani può essere un gran vantaggio: i robot, non temendo il virus e le sue conseguenze, possono ridurre i rischi e il carico di lavoro del personale, svolgendo alcuni compiti semplici ma gravosi.
In Cina, nel corso della battaglia che è stata combattuta a tutto campo contro la diffusione del COVID-19, sono già state sperimentate applicazioni in cui dei robot svolgono compiti di ausilio all’uomo, come ad esempio lo screening mediante termometri o telecamere a infrarossi, la disinfezione di superfici, la consegna di pasti e medicine a persone anziane o in isolamento. In Spagna, per combattere l’emergenza, sono in corso di impiego robot per accelerare gli esami di laboratorio sui tamponi. Tutto questo non va a sostituire il lavoro umano, ma a integrarlo, consentendo al personale medico, paramedico e socio-sanitario di concentrarsi su compiti più delicati e impegnativi, oltre a ridurre molti dei rischi che altrimenti correrebbe.
Bisogna inoltre sottolineare che i robot non soltanto processano informazioni e dati, ma sono soprattutto macchine capaci di agire, muoversi, manipolare, sollevare pesi, trasportare, e molto altro. È questo che serve in possibili analoghe emergenze future o, semplicemente, per razionalizzare molti servizi sanitari, in modo da ottimizzare l’uso delle risorse umane e finanziarie, migliorando nel contempo la qualità e l’efficacia di alcuni di questi servizi. Una sfida nevralgica, quindi, per costruire – insieme, ovviamente, alla ricerca biologica e medica – una società del futuro più sicura e meno soggetta ai rischi che porranno possibili pandemie future, in cui l’Italia è pronta a svolgere un ruolo centrale grazie alle idee e al lavoro di molti scienziati che hanno permesso al nostro Paese di essere riconosciuto come uno dei leader mondiali della robotica.
Secondo il Prof. Paolo Dario “la situazione drammatica che stiamo vivendo rende evidente, e ci deve far riflettere su quanto operazioni svolte o assistite dai robot potrebbero essere utili. Si tratta di agire e di mettere in azione tutto quello che nel nostro Paese, ma anche in Europa, è stato fatto e preparato: eccellenza nella ricerca e nella formazione di giovani ricercatori; applicazioni di avanguardia; industrie attive e presenti sul mercato; una comunità vasta, interconnessa a livello nazionale e internazionale, e fortemente motivata a intervenire. Più che mai in questo momento la ricerca scientifica, la formazione di qualità e la capacità di tradurre tutto questo in applicazioni si dimostrano asset fondamentali, e la Scuola Superiore Sant’Anna è impegnata con tutte le sue risorse per garantire il proprio contributo. Come è pronto a fare l’intero sistema delle Università e delle istituzioni di ricerca italiane. In particolare noi assieme a molti colleghi e a gruppi italiani di grandissima qualità e di elevata reputazione internazionale in robotica, portiamo avanti questa visione e questa strategia da oltre 30 anni.”
Gli autori dello studio Combating COVID-19 — The role of robotics in managing public health and infectious diseases sono:
Guang-Zhong Yang, Institute for Medical Robotics – Shanghai Jiao Tong University;
Bradley Nelson, Robotics and Intelligent Systems – ETH Zurich;
Robin R. Murphy, Computer Science and Engineering – Texas A&M University;
Henrik Christensen, Contextual Robotics Institute, Jacobs School of Engineering – University of California San Diego;
Steven Collins, Department of Mechanical Engineering – Stanford University;
Paolo Dario, Istituto di BioRobotica – Scuola Superiore Sant’Anna di Pisa;
Ken Goldberg, Industrial Engineering and Operations Research – University of California, Berkeley;
Koji Ikuta, Graduate School of Information Science and Technology – University of Tokyo;
Neil Jacobstein, Artificial Intelligence and Robotics – Singularity University, NASA Research Park;
Danica Kragic, School of Electrical Engineering and Computer Science – Royal Institute of Technology, Stockholm;
Russell H. Taylor, Laboratory for Computational Sensing and Robotics – Johns Hopkins University, Baltimore;
Marcia McNutt, National Academy of Science – National Research Council, Washington;
Howie Choset, Computer Science – Carnegie Mellon University, Pittsburgh.
Testo redatto su fonte Scuola Superiore Sant’Anna di Pisa del 25 marzo 2020
Per approfondimenti: Combating COVID-19 — The role of robotics in managing public health and infectious diseases, DOI: 10.1126/scirobotics.abb5589 – Science Robotics | 25.03.2020
Image credit: Stäubli International AG
© Copyright ADEPRON – Riproduzione riservata
 RIABILITAZIONE ROBOTICA
RIABILITAZIONE ROBOTICA
Progetto “GRASP Toscana”: utilizzare gli esoscheletri e la soft robotics per agevolare la riabilitazione della mano tetraplegica di pazienti con lesioni alla spina dorsale o al midollo spinale
02.11.2018
Testo dell’articolo
Con l’intento di supportare le persone affette da questa patologia, la Fondazione CR Firenze ha finanziato GRASP Toscana, un progetto di ricerca di 2 anni che sarà sviluppato dall’Istituto TeCIP (Tecnologie della Comunicazione, dell’Informazione e della Percezione) della Scuola Superiore Sant’Anna di Pisa, con la supervisione scientifica di Antonio Frisoli, docente del Laboratorio di Robotica Percettiva (PERCRO) dello stesso istituto, in collaborazione con l’Azienda ospedaliera universitaria di Careggi (Firenze) e con la partecipazione dell’Associazione Habilia e dell’Associazione Toscana Paraplegici (ATP).
 |
 |
 |
GRASP Toscana si prefigge l’utilizzo delle innovazioni raggiunte nei campi degli esoscheletri (robot indossabili), della soft robotics e del controllo muscolare di sistemi robotici per lo sviluppo di nuove tecnologie robotiche, al fine di agevolare la riabilitazione e facilitare l’assistenza della mano tetraplegica del paziente che ha subito lesioni midollari alla spina dorsale o al midollo spinale.
Questo nuovo progetto prosegue il percorso intrapreso con CLIMB (progetto a cui ha partecipato l’Istituto TeCIP, ed anch’esso sostenuto dalla Fondazione CR Firenze) per la sperimentazione clinica dell’uso degli esoscheletri robotici indossabili, i cui risultati sono stati presentati a dicembre 2017. In quel caso si trattava della sperimentazione clinica di un esoscheletro per consentire il movimento e il cammino alle gambe paralizzate: un dispositivo di esercizio e riabilitazione di nuova generazione per permettere ai pazienti di evitare l’uso della sedia a rotelle. Questo consente loro di muoversi mantenendo la posizione eretta e di migliorare, non soltanto l’autonomia, ma anche la funzione degli organi interni e, quindi, lo stato di salute generale.
La sfida sarà ora quella di applicare le tecnologie innovative della robotica soffice per l’assistenza della mano tetraplegica al fine di fornire un ulteriore aiuto alle persone affette da questa lesione.
Testo redatto su fonte Scuola Superiore Sant’Anna del 30 ottobre 2018
Images credit: Scuola Superiore Sant’Anna di Pisa
© Copyright ADEPRON – Riproduzione riservata
 RIABILITAZIONE ROBOTICA
RIABILITAZIONE ROBOTICA
RETRAINER: progetto di una innovativa piattaforma (esoscheletro e neuro-protesi) per la riabilitazione della mano e del braccio in pazienti neurologici colpiti da ictus
28.12.2017
Testo dell’articolo
Gli esercizi riabilitativi prevedono l’utilizzo di oggetti interattivi che riconoscono in modo automatico il raggiungimento delle posizioni target. Il terapista sceglie gli esercizi e ne imposta i parametri in base alle esigenze del singolo paziente grazie all’utilizzo di un’interfaccia grafica su tablet. La stessa interfaccia grafica guida il paziente durante l’esecuzione degli esercizi e gli fornisce un feedback in tempo reale sul grado di coinvolgimento attivo.
Gli 8 prototipi della piattaforma RETRAINER sono attualmente utilizzati all’interno di uno studio multicentrico che si sta svolgendo nel Centro di riabilitazione Villa Beretta di Costa Masnaga (Lecco) e nella clinica Asklepios Klinik Alsbach GMBH in Germania, partners clinici del progetto. L’obiettivo dello studio è quello di valutare l’efficacia di RETRAINER rispetto ad un programma riabilitativo tradizionale nel recupero delle funzioni dell’arto superiore a valle di un ictus.
Nel periodo 2015-2018 il progetto prevede di reclutare una popolazione complessiva di 140 pazienti: attualmente sono stati reclutati circa 85 pazienti e i primi risultati sembrano confermare l’efficacia del sistema. RETRAINER è un consorzio formato da Politecnico di Milano (coordinamento scientifico) con i partner tecnologici: Università Tecnica di Vienna, Università Tecnica di Berlino, École Polytechnique Fédérale di Losanna e altre 2 aziende.
Testo redatto su fonte Politecnico di Milano del 19 dicembre 2017
Image credit: consorzio RETRAINER
© Copyright ADEPRON – Riproduzione riservata
 ESOSCHELETRI ROBOTICI
ESOSCHELETRI ROBOTICI
CLIMB, progetto per lo sviluppo e la sperimentazione clinica di dispositivi robotici indossabili di nuova generazione a supporto delle persone colpite da gravi lesioni midollari
22.12.2017
Testo dell’articolo
CLIMB è il il progetto toscano per la sperimentazione clinica dell’uso degli esoscheletri robotici (indossabili) a supporto delle persone con lesione midollare. L’esoscheletro è un sistema robotico che consente il movimento e il cammino alle gambe paralizzate supportando, quando possibile, le capacità muscolari rimaste dopo la lesione del midollo spinale. È un dispositivo di esercizio e riabilitazione i cui effetti positivi sulla condizione psicofisica delle persone con lesione midollare sono in fase di studio. L’esoscheletro rappresenta una delle tecnologie in grado di potenziare le capacità umane di maggiore interesse scientifico e da cui ci si attende ricadute sociali molto ampie, soprattutto in ambito riabilitativo e assistenziale, poiché può operare in modo simbiotico con le persone, essendo in grado di potenziare o di supplire alle funzioni del corpo.
Realizzato dall’Unità Spinale AOUC dell’ospedale universitario Careggi di Firenze in collaborazione con la Scuola Superiore Sant’Anna di Pisa, il progetto prevede l’utilizzo di innovazioni tecnologiche nella riabilitazione, quali l’esoscheletro per il recupero del cammino della persona affetta da lesione midollare. La scelta dell’utilizzo di esoscheletri di nuova generazione, come quelli impiegati per CLIMB, è motivata dalle possibilità offerte da questo tipo di strumento che consente ai pazienti di non utilizzare la sedia a rotelle e mantenere la stazione eretta per la deambulazione.
Quelli che saranno testati con CLIMB rappresentano una rivoluzionaria tecnologia per consentire ai pazienti paraplegici di poter mantenere la stazione eretta e camminare, con una serie di importanti benefici a livello della funzionalità corporee. Ne potranno conseguire aspetti potenzialmente positivi dal punto di vista riabilitativo, come il miglioramento non solo dell’autonomia ma anche della funzione degli organi interni e quindi dello stato di salute generale
Sono in fase di sperimentazione anche nuove tecnologie di “soft robotics” per creare esoscheletri robotici per la mano, leggeri e indossabili, in grado di restituire ai pazienti con tetraplegia la funzione manuale più naturale.
Testo redatto su fonte Scuola Superiore Sant’Anna di Pisa del 19 dicembre 2017
Image credit: Scuola Superiore Sant’Anna di Pisa
© Copyright ADEPRON – Riproduzione riservata
 RIABILITAZIONE ROBOTICA
RIABILITAZIONE ROBOTICA
Progetto CYBERLEGs: sviluppate nuove tecnologie robotiche indossabili per aiutare gli amputati transfemorali a recuperare un cammino più naturale ed efficiente
19.03.2015
Testo dell’articolo
CYBERLEGs ha raggiunto l’obiettivo di testare in via preliminare nuove tecnologie robotiche indossabili per aiutare gli amputati transfemorali (al di sopra del ginocchio) a recuperare un cammino più naturale ed efficiente, sviluppando applicazioni che hanno già dimostrato la loro funzionalità nelle settimane di test pre-clinici condotti a Firenze.
Il sistema “Active Pelvis Orthosis”, lo “zainetto” che agevola il movimento
Il progetto ha messo a punto un’ortesi bilaterale di bacino (un sofisticato tutore), robotizzata e capace di assistere il movimento che permette di flettere e di estendere l’anca. Il dispositivo, che appare contenuto in una sorta di zainetto, è stato progettato per essere ergonomico e quindi adattarsi alla schiena senza alterarne la postura. In virtù di un meccanismo che segue la naturale biomeccanica dell’anca la coppia che permette il movimento risulta sempre allineata con l’asse che garantisce la sua estensione e la sua flessione. Questo dispositivo agisce attraverso batterie, presenta un’autonomia di tre ore e permette agli amputati di camminare tanto all’interno quanto all’esterno. Utilizzando schemi di controllo bio-ispirati, basati su quelle che vengono definite “primitive motorie”, e usando attuatori (sistemi di movimento), il dispositivo non pone ostacoli alla capacità e all’intenzione motoria della persona amputata che lo indossa e che riceve un’assistenza motoria gentile e naturale, se e quando è necessario. “A ogni passo l’ortesi robotizzata – commenta Nicola Vitiello – fornisce all’amputato un surplus di energia e permette in questo modo di ripristinare un cammino più fisiologico.”
La protesi transfemorale robotica, il sistema di sensori indossabili, la scarpa “intelligente” per camminare di nuovo
La nuova protesi transfemorale motorizzata permette di camminare, di sedersi, di salire o di scendere le scale, dimenticando la sedia a rotelle. In virtù dell’utilizzo di elementi elastici passivi, uniti ad attuatori elettromagnetici che permettono il movimento sia per il giunto del ginocchio sia della caviglia, la protesi permette alla persona amputata di riprendere un cammino più fisiologico ed efficiente dal punto di vista energetico. Da una parte, i motori possono fornire energia durante la fase di appoggio, dall’altra parte gli elementi elastici passivi possono assorbire l’impatto con il terreno, garantendo la naturale flessione del ginocchio durante la fase del carico. In aggiunta, i motori forniscono assistenza nel passaggio dalla postura seduta a quella eretta e viceversa. L’interfaccia con la protesi è ottenuta attraverso sensori che possono essere indossati, costituiti da scarpe “intelligenti”, equipaggiate con sensori di pressione ed una rete di sette sensori inerziali, solidali con ciascuno dei sei principali segmenti anatomici degli arti inferiori e con il tronco. Grazie ai dati forniti da questi sensori, un sistema di controllo intelligente può riconoscere il movimento desiderato dalla persona amputata e tradurre tale intenzione in comandi di movimento che si trasmettono ai motori della protesi. Nel corso del progetto sei amputati transfemorali hanno provato la protesi con successo, svolgendo compiti motori quali camminare, sedersi, alzarsi, salire le scale. Tutti gli amputati hanno interagito bene con la protesi. I risultati hanno confermato l’efficacia e la fattibilità di utilizzare una rete di sensori indossabili come interfaccia non invasiva tra uomo e macchina, per comandare una protesi d’arto inferiore robotizzata.
Protesi e ortesi (tutore) uniti per garantire il cammino in sicurezza
Un’altra frontiera esplorata con successo si è concretizzata nell’unione tra protesi transfemorale con l’ortesi (tutore) attiva di bacino. Il dispositivo è stato definito dai ricercatori “orto-protesi”. L’idea ha avuto origine dalla considerazione secondo la quale, in futuro, gli amputati potrebbero beneficiare di una protesi unita a un’ortesi (tutore). Mentre la protesi sostituisce l’arto mancante, l’ortesi può compensare le inefficienze del cammino derivanti dal fatto che la protesi, sebbene avanzata, non è in grado di restituire un cammino efficiente come quello naturale. L’idea è stata testata in via preliminare coinvolgendo quattro amputati e tutti sono stati in grado di muoversi con questo sistema. “Tuttavia – sottolinea Nicola Vitiello – i risultati suggeriscono una ulteriore ingegnerizzazione del sistema per ridurne ancora gli ingombri ed il peso, migliorando così il comfort per la persona amputata”.
Cadute, rischio diminuito
CYBERLEGs ha affrontato altre due sfide scientifiche. La prima riguardava la creazione di un collegamento bidirezionale con la protesi. Il progetto ha sviluppato un sistema miniaturizzato che la persona può indossare e attraverso i quali ricevere una sorta di ritmo, che gli permette di riprendere e di mantenere un cammino più simmetrico. La seconda sfida era dedicata al rischio di cadute. Il progetto ha messo a punto strategie per riconoscere in tempo reale un possibile scivolamento. L’idea, che sarà sviluppata in un’ottica di lungo periodo, è che il sistema robotico possa fornire un’assistenza che mitighi il rischio di caduta, dopo aver riconosciuto in tempo reale l’inizio dello scivolamento.
Testo redatto su fonte Scuola Superiore Sant’Anna di Pisa del 16 marzo 2015
Per approfondimenti: www.cyberlegs.eu
Image credit: CYBERLEGs
© Copyright ADEPRON – Riproduzione riservata
 RIABILITAZIONE ROBOTICA
RIABILITAZIONE ROBOTICA
Si sta avviando alla fase conclusiva CYBERLEGs, il progetto di ricerca europeo per protesi robotizzate che restituiranno la capacità di camminare a persone amputate e anziane
17.12.2014
Testo dell’articolo
Il progetto ha sviluppato due dispositivi integrati: una protesi robotizzata che sostituisce l’arto amputato e un’ortesi pelvica, anch’essa robotizzata, che – collegata a entrambi gli arti – aiuta il movimento e facilita il cammino. Proprio in questo dispositivo pelvico e nella sua integrazione con la “gamba artificiale” risiede l’elemento più innovativo: si tratta di una sorta di “tutore attivo”, che, dopo la fase sperimentale, assumerà l’aspetto di un paio di pantaloncini facili da indossare e che agevolerà il movimento delle gambe, aiutandolo nella fase di spinta. L’interazione dei due dispositivi permette di camminare, di salire le scale, di sedersi e di rialzarsi da una sedia, senza eccessiva fatica fisica, senza pesanti ingombri e, soprattutto, senza una tecnologia troppo complessa da gestire.
Altre applicazioni innovative rendono il dispositivo un vero strumento per facilitare il movimento e non una semplice “gamba artificiale”. Ad esempio, sono stati eseguiti esperimenti per “addestrare” i moduli a riconoscere il rischio di caduta, che potrebbe rivelarsi pericolosa in persone anziane. Un complesso sistema di decodifica e di gestione delle “intenzioni di movimento” del paziente decodifica in circa 300 millisecondi una situazione di rischio. Un altro sistema sperimentato è lo sviluppo di sensori per trasmettere al paziente le sensazioni del cammino: stimoli, come la sensazione di poggiare il piede a terra, che risultano importanti per gestire il movimento e rendere la camminata più armonica e naturale. I ricercatori hanno anche semplificato gli apparati tecnologici e ridurre al massimo il cosiddetto “sforzo cognitivo” di coloro che, un giorno, indosseranno il sistema, proprio per non scoraggiarne l’utilizzo.
Testo redatto su fonte Scuola Superiore Sant’Anna di Pisa del 16 dicembre 2014
Per approfondimenti: www.cyberlegs.eu
Image credit: CYBERLEGs
© Copyright ADEPRON – Riproduzione riservata
 NEUROCHIRURGIA ROBOTICA
NEUROCHIRURGIA ROBOTICA
Al CTO di Torino è in dotazione sperimentale Mazor, il primo robot neurochirurgico utilizzato in Italia nel campo della chirurgia spinale, sia aperta sia mininvasiva percutanea
09.10.2014
Testo dell’articolo
Il sistema Mazor è molto maneggevole ed ha un’accuratezza pari al 99% nel raggiungere il bersaglio ed infine non è condizionato dall’utilizzo di raggi infrarossi esposti facilmente ad interferenze. Il robot consente di riprodurre fedelmente in sala operatoria una procedura chirurgica già precedentemente pianificata fuori della sala sulla base delle immagini radiologiche. Rispetto alla tecnica chirurgica tradizionale, l’utilizzo del sistema robotico permette la riduzione di circa il 60% dell’esposizione a radiazione intraoperatoria, del 50% delle complicanze postoperatorie, del 30% del periodo di degenza in ospedale e del 50% il numero di reinterventi, oltre ad una rilevante riduzione della terapia antalgica postoperatoria. Il tempo chirurgico dell’intervento si riduce di circa il 60%, infatti, ad esempio nelle stabilizzazioni vertebrali, il posizionamento corretto di una vite transpeduncolare richiede un tempo medio di circa tre minuti. Nella maggior parte dei casi di fissazione vertebrale i segmenti su cui s’interviene sono due, con l’applicazione totale di quattro viti.
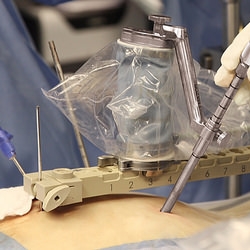
Il sistema robotizzato ha tre componenti: 1) una stazione di lavoro equipaggiata di un computer che controlla i movimenti del dispositivo di posizionamento degli strumenti e che attraverso un touch screen consente di controllare le immagini radiologiche; 2) un software dedicato che consente di fondere le immagini radiologiche acquisite prima dell’intervento con quelle ottenute in sala operatoria; 3) una unità di posizionamento che può essere fissata sia sul paziente sia al tavolo operatorio e che dispone di una cannula di lavoro attraverso la quale vengono fatti scorrere gli strumenti chirurgici ed i mezzi di fissazione da impiantare. Il computer della stazione di lavoro governa i movimenti dell’unità fino a riprodurre le traiettorie pianificate prima dell’intervento.
La procedura chirurgica, ad esempio d’impianto di mezzi di fissazione spinale assistita dal robot, si compone di quattro passaggi.
1) Il primo passaggio è la pianificazione dell’intervento chirurgico sulle immagini radiografiche acquisite in fase preoperatoria. In questa fase sono definite le traiettorie ottimali per la corretta posizione dei mezzi di impianto, come ad esempio delle viti vertebrali nonché le dimensioni delle viti stesse.
2) Il secondo passaggio è quindi il montaggio intraoperatorio di una piattaforma solidale con la colonna vertebrale del paziente.
3) Il terzo passaggio è l’acquisizione intraoperatoria di due immagini radiologiche del segmento di colonna vertebrale su cui si opera. Le immagini così acquisite saranno elaborate dal software della stazione di lavoro fuse con le immagini radiografiche, ad esempio TC, acquisite pre operatoriamente e sulle quali è stata pianificata la procedura chirurgica. Il processo di fusione è automatico con valutazione dell’affidabilità della fusione delle immagini.
4) Il quarto ed ultimo passaggio è montare sulla piattaforma, solidale con la colonna vertebrale del paziente, il dispositivo per la posizione degli strumenti chirurgici. Il computer della stazione di lavoro manderà nella corretta posizione la cannula di lavoro del dispositivo in accordo con le traiettorie preventivamente pianificate. Eseguito questo passaggio, si collocheranno nelle vertebre le viti del sistema di fissazione vertebrale.
Testo redatto su fonte Ospedale CTO di Torino del 7 ottobre 2014
Image credit: A.O.U. Città della Salute e della Scienza di Torino
© Copyright ADEPRON – Riproduzione riservata
 RIABILITAZIONE ROBOTICA
RIABILITAZIONE ROBOTICA
Il MARlab dell’OPBG è dotato dei più avanzati sistemi di riabilitazione robotica per il recupero funzionale dei deficit motori dei bimbi, un’eccellenza a livello internazionale
19.07.2014
Testo dell’articolo
I dispositivi robotici ad alta tecnologia sviluppati negli ultimi anni consentono di cambiare radicalmente le abilità dei bambini con problemi motori, rendendoli nuovamente autonomi sia nella deambulazione che nell’uso delle scale. I robot rappresentano una nuova opportunità riabilitativa: con un approccio simile a un video-game, aumentano la motivazione nei piccoli pazienti e attivano la plasticità cerebrale alla base del recupero funzionale degli arti grazie all’interattività e all’intensità del trattamento.
MARLab, il Laboratorio di Robotica e Analisi del Movimento dell’Ospedale Pediatrico Bambino Gesù (OPBG) di Santa Marinella, è dotato dei più avanzati sistemi di riabilitazione robotica per il recupero funzionale dei deficit motori dei bambini. Medici, infermieri, tecnici, riabilitatori e ingegneri dell’OPBG studiano e sviluppano tecnologie e brevetti originali per restituire la possibilità di camminare ai bambini che hanno perso, per motivi diversi, l’uso delle gambe. Oltre al nuovo Lokomat, nel MARLab vengono utilizzati altri macchinari robotici di ultima generazione come il Re-Walk, l’Anklebot e il WAKE-UP.
Re-Walk è un esoscheletro pediatrico (apparecchio di supporto completo caratterizzato da motori alle giunture, batterie ricaricabili, un insieme di sensori e un sistema di controllo computerizzato) col quale bambini e ragazzi con disabilità possono tornare a camminare. Questo robot è stato adattato per l’uso pediatrico dal Bambino Gesù in collaborazione con ARGO Medical Technologies di Haifa (Israele). Il MARLab di S. Marinella è l’unico centro al mondo in cui il Re-Walk viene utilizzato con pazienti di età inferiore a 18 anni.
Anklebot è un robot utilizzato per riabilitare il movimento delle caviglie di bambini tra i 5 e gli 8 anni affetti da paralisi cerebrale infantile, realizzato dal Bambino Gesù in collaborazione con l’Università “Sapienza” di Roma e il Massachusetts Institute of Technology di Boston.
WAKE-UP (Wearable Ankle Knee Exoskeleton) è il prototipo di un dispositivo robotico, sviluppato in collaborazione con il Dipartimento di Ingegneria Meccanica e Aeronautica dell’Università di Roma “Sapienza” (Prof. Paolo Cappa), per il recupero del cammino in bambini con danni neurologici causati da ictus o da paralisi cerebrale infantile.
Presso la sede di Palidoro è utilizzata anche una particolare “pedana” mobile – la piattaforma RotoBit – per la riabilitazione al cammino e alla posizione eretta. Per riabilitare la mobilità degli arti superiori si ricorre invece al robot IMT2. Attraverso l’applicazione di una serie di sensori sul paziente, gli specialisti possono studiarne i movimenti (che vengono “tradotti” in grafici sul computer); contemporaneamente, l’uso delle pedane rieduca il bambino a camminare correttamente.
Testo redatto su fonte Ospedale Pediatrico Bambino Gesù del 16 luglio 2014
Image credit: Ospedale Pediatrico Bambino Gesù – IRCCS
© Copyright ADEPRON – Riproduzione riservata
 RIABILITAZIONE ROBOTICA
RIABILITAZIONE ROBOTICA
OPBG di Santa Marinella: Lokomat, il robot di ultima generazione che consente il recupero della funzionalità delle gambe nei pazienti pediatrici con disabilità motorie
17.07.2014
Testo dell’articolo
Il Lokomat istallato nel MARLab di Santa Marinella è un sofisticato macchinario per il trattamento riabilitativo delle patologie congenite e acquisite del sistema nervoso e muscolo scheletrico. Utilizzato nei centri nazionali e internazionali di riabilitazione più avanzati, e ora – primo nel Lazio – anche al Bambino Gesù grazie alla Fondazione Roma, può essere adattato alla lunghezza degli arti dei bambini durante la crescita, a partire dall’età di 3 anni e consente di controllare in tempo reale ogni fase del passo, supportando e correggendo i movimenti delle gambe dei piccoli pazienti.
É costituito da quattro componenti principali: l’esoscheletro che viene indossato dal bambino e ne controlla il cammino, il tapis-roulant che si muove in sincronia con i passi del paziente, un sistema per alleggerire il peso e ridurre la fatica e l’interfaccia con la realtà virtuale. L’utilizzo di sistemi di realtà virtuale, avatar del corpo del bambino che simula il suo cammino in ambienti diversi, consente un approccio ludico alla terapia e motiva il piccolo paziente a proseguire nel programma riabilitativo, spesso molto lungo.
A pieno regime il Lokomat potrà essere utilizzato da almeno 6 pazienti al giorno che effettueranno sedute di circa un’ora e mezza. Per ciascuna seduta (ogni trattamento ne prevede in media 20) personale appositamente preparato adatterà il robot alle esigenze specifiche del bambino. Si stima che saranno circa 100 i bambini che in un anno potranno trarre vantaggio dal nuovo robot. Presso il MARLab vengono seguiti 350 piccoli pazienti l’anno e con l’impiego del Lokomat, che si aggiunge alle attrezzature già disponibili, in dodici mesi il Laboratorio potrà garantire oltre 2.000 trattamenti riabilitativi robotici.
Testo redatto su fonte Ospedale Pediatrico Bambino Gesù del 16 luglio 2014
Image credit: SUITX/US Bionics, Inc.
© Copyright ADEPRON – Riproduzione riservata
 ROBOTICA BIOMEDICA
ROBOTICA BIOMEDICA
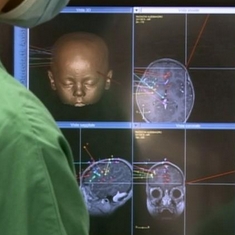
Eseguita per la prima volta in Europa nell’OPBG di Roma una nuova procedura di stimolazione cerebrale profonda robot-assistita su un bimbo affetto da distonia
02.05.2014
Testo dell’articolo
Il giorno dell’operazione – con l’ausilio di un sofisticato robot – una équipe di specialisti impianta nel cervello del paziente un microelettrodo che genera una “interferenza neuronale” per il controllo dei sintomi della malattia o della disfunzione del sistema. L’elettrodo è collegato ad un generatore di impulsi che può essere programmato e adeguato (per intensità e durata) alle esigenze cliniche del bambino.
La distonia è un disturbo motorio che si manifesta in età pediatrica caratterizzato dalla comparsa di movimenti involontari, ripetitivi e incontrollati dovuti alla cocontrazione dei muscoli antagonisti. Può colpire qualunque parte del corpo: braccia, gambe, tronco, collo, viso o corde vocali e determina posture anomale talvolta dolorose. È una patologia rara che interessa dalle 50 alle 1.000 persone per milione di abitanti. In Italia le persone con distonia sono circa 20.000. Le difficoltà motorie dei bambini che ne sono affetti sono spesso causa di disabilità grave e possono influire sullo sviluppo cognitivo, comportamentale e sul loro adeguato inserimento sociale.
Il Bambino Gesù – Centro di riferimento nazionale per la diagnosi e la cura dei disturbi del movimento in età pediatrica – offre, oltre all’expertise degli specialisti del team multidisciplinare, tecnologie avanzate per la diagnosi e il trattamento di questo tipo disturbo. I piccoli pazienti vengono seguiti per l’intero percorso: dall’analisi del movimento computerizzata per la definizione del problema e della terapia più adeguata alla neuro-riabilitazione robotica. Presso l’Ospedale Pediatrico romano ogni anno vengono sottoposti a trattamento chirurgico circa 15 pazienti affetti da disturbo del movimento.
Testo redatto su fonte Ospedale Pediatrico Bambino Gesù del 30 aprile 2014
Image credit: Ospedale Pediatrico Bambino Gesù – IRCCS
© Copyright ADEPRON – Riproduzione riservata
 RIABILITAZIONE ROBOTICA
RIABILITAZIONE ROBOTICA
Presentato a Pisa il prototipo di un sistema robotico esoscheletrico per agevolare il percorso riabilitativo dei pazienti che hanno subito lesioni midollari
06.04.2014
Testo dell’articolo
Durante il convegno, è stato presentato un sistema robotico già acquisito presso il “Centro mielolesi” dell’Aoup e che farà da base per svilupparne uno ancora più efficace, nell’ambito di un progetto triennale di ricerca appena avviato e finanziato con circa 500.000 euro dal Ministero della Salute, dopo una severissima selezione (soltanto l’8% dei progetti l’ha superata), portato avanti dall’Istituto di BioRobotica e dallo stesso “Centro mielolesi” dell’Azienda ospedaliera universitaria pisana, in particolare dal ricercatore Stefano Mazzoleni e dal Direttore del Centro, Giulia Stampacchia, che ne sarà la responsabile scientifica. Il progetto rientra nell’ambito di un percorso per ottimizzare i percorsi riabilitativi per chi ha subìto mielolesioni, all’interno della Regione Toscana e, per questo motivo, è coinvolto con un ruolo di primo piano l’Ospedale di Careggi, con la sua unità spinale.
Grazie a questo progetto di ulteriore sviluppo, il sistema robotico costituirà la base di partenza per un significativo miglioramento delle funzionalità e delle prestazioni robotiche degli esoscheletri per agevolare riabilitazione e cammino. “Il nostro obiettivo – spiega Giulia Stampacchia – è arrivare a un’ortesi, cioè a un sistema che permetta chi lo indossa di muoversi stando in piedi, lasciando così la sedia a rotelle. Questo – continua – porterà indubbi vantaggi alle persone con lesione al midollo spinale. Pensiamo a Pisa e a tutte le città dove, nonostante il grande impegno delle Amministrazioni, restano molte barriere architettoniche, superabili con difficoltà da chi sta in sedia a rotelle”.
In questo progetto, ancora una volta, l’Azienda ospedaliera universitaria pisana e l’Istituto di BioRobotica del Sant’Anna, si trovano ad agire fianco a fianco, in maniera sinergica. “La collaborazione fra ricercatori e clinici – commenta l’Ing. Stefano Mazzoleni, ricercatore dell’Istituto di BioRobotica – contribuisce ad aumentare l’efficacia dei risultati e a rendere più brevi i tempi. Come già avvenuto con il Laboratorio congiunto con Auxiliium Vitae a Volterra, stiamo sperimentando una nuova figura, quella del ‘bioingegnere embedded’ cioè che sta a contatto con i medici e con i terapisti e che tutti i giorni cerca di portare un contributo, stando a diretto contatto con la vita del reparto. Questo sistema di interazione con i medici lo stiamo sperimentando già dal 2007”. Sul fronte della riabilitazione – precisa Mazzoleni – risultati incoraggianti “arrivano dall’utilizzo della ‘fes’, la stimolazione elettrica funzionale”, che può agevolare – insieme ai sistemi robotici – i pazienti con lesioni spinali”.
Testo redatto su fonte Scuola Superiore Sant’Anna di Pisa del 5 aprile 2014
Image credit: Ekso Bionics
© Copyright ADEPRON – Riproduzione riservata
 RIABILITAZIONE ROBOTICA
RIABILITAZIONE ROBOTICA
Ricercatori del Politecnico di Torino sviluppano PIGRO, un tutore attivo per il recupero neuro-motorio degli arti inferiori in pazienti colpiti da ictus o da traumi cranici
29.12.2013
Testo dell’articolo
Lo studio della macchina inizia nel 2006, partendo da esperienze precedenti sviluppate dai gruppi: DIMEAS Politecnico, Dipartimento di Psicologia (Università di Torino), Centro Puzzle (Torino). Nel 2012 viene depositata domanda di brevetto internazionale. Nel 2013 inizia una sperimentazione clinica presso l’Azienda Ospedaliera di Fossano, gruppo del Dott. Gianfranco Lamberti.
Gianfranco Lamberti è Direttore della struttura di Neuroriabilitazione: “Nella disabilità sono oggi i cronici ad avere un impatto sociale più significativo. Alcuni li considerano non più recuperabili dal punto di vista fisico e sociale, ma non è così e sono fiero che questo ospedale possa contribuire con questa ricerca a confermare il cambio di visione. Spero che il nostro sia un viatico per i percorsi ipotizzati nel nuovo atto aziendale”.
Gabriella Eula è Professore Associato al Politecnico di Torino, nel Dipartimento del Prof. Guido Belforte, con il quale si è formata: “Le prime sperimentazioni su paraplegici sono state avviate sin dal 2006. La macchina ha il vantaggio, rispetto all’uomo, di essere più precisa. PIGRO è un tutore attivo, maneggevole, leggero, versatile, vestito sulle gambe dei pazienti, dapprima sottoposti a risonanza magnetica per capire il tipo di danno cerebrale: dopo 3 settimane di trattamento si esegue un’analisi sul cervello per verificare il naturale recupero sugli arti inferiori. Con questo prototipo, più volte migliorato con quattro diverse versioni dal 2006 al 2012, studiamo la possibilità di attivare nuovi circuiti motori con macchine robotizzate. É possibile trattare anche due pazienti contemporaneamente, pensiamo anche ad un suo utilizzo come ausilio per il trattamento in acqua, nel prossimo futuro. La macchina che abbiamo progettato, rispetto ad un tapis roulant, ha il vantaggio di consentire un cammino mobile in una stanza rispetto a un punto fisso”.
La riabilitazione motoria degli arti inferiori a seguito di lesioni cerebrali è sempre un iter complesso. Il tutore attivo PIGRO induce la movimentazione di caviglia, ginocchio ed anca, simulando il passo fisiologico. Il movimento passivo per il paziente induce un’attivazione propriocettiva e cinestesica, che produce un input afferente ai circuiti motori, con una funzione di riattivazione. Il sistema presentato è utile per la riabilitazione degli arti inferiori effettuando trattamenti in sospensione con completo sgravio del peso ed in futuro anche a terra, con parziale sgravio del peso. Il tutore qui oggetto di invenzione è facilmente trasportabile, leggero, sensibilmente più economico rispetto a quelli attualmente in uso e permette di effettuare una serie di protocolli clinici anche innovativi.In particolare PIGRO non è un robot per l’assistenza del paziente durante la vita quotidiana, ma una macchina destinata a strutture specializzate in opportuni recuperi neuro-motori.Il progetto di tale ortesi può essere pensato estendibile in futuro anche a trattamenti riabilitativi in acqua.
Il tutore PIGRO può essere usato per trattare difficoltà, anche gravi, del movimento degli arti inferiori a seguito di diverse patologie del sistema nervoso centrale. Il tutore offre la possibilità di attivazione (eventualmente removibile) della caviglia e l’esecuzione di alcuni moti fisiologici del cammino umano non consentiti da altri macchinari simili. PIGRO mira alla riorganizzazione funzionale delle aree cerebrali motorie. Tale riorganizzazione può essere valutata tramite studi di risonanza magnetica funzionale.
Il tutore PIGRO può essere facilmente trasportato, dato che il suo peso è di circa 30 kg. Slitte di regolazione permettono di variare la larghezza pelvica, la lunghezza del femore e quella della tibia, fornendo una macchina adeguata a coprire un range antropometrico compreso tra il 10%ile donna ed il 90%ile uomo.
PIGRO è poi dotato sia di sensori angolari, fondamentali per il controllo in posizione elettro-pneumatico che lo guida, sia di traduttori di pressione, utili per vari studi sul funzionamento del sistema e sull’interazione uomo-macchina. Tutti i dati del paziente e della seduta sono salvati su PC grazie ad una adeguata interfaccia grafica. É stato effettuato anche uno studio sul comfort della macchina, legato sia alla sua ergonomia, sia ai materiali in uso. Infatti l’interfaccia uomo-paziente e l’imbrago per la sospensione del medesimo sono ora tutti di natura tessile, con adeguata rigidezza, comfort, lavabilità ed universalità su diverse corporature uomo/donna.
Testo redatto su fonte Politecnico di Torino
Image credit: ASL CN1
© Copyright ADEPRON – Riproduzione riservata
 MICRO-BIOROBOTICA
MICRO-BIOROBOTICA
Secondo un team di ricercatori della SISSA di Trieste, i robot miniaturizzati del futuro saranno “morbidi” e potranno veicolare i farmaci all’interno del corpo umano
07.12.2013
Testo dell’articolo
De Simone e il suo team della SISSA studiano da anni il movimento degli euglenidi, animali unicellulari acquatici. Uno degli scopi delle ricerche di De Simone – che di recente hanno ricevuto un advanced grant dall’European Research Council di un milione e 300 mila euro – è trasferire le conoscenze acquisite dagli euglenidi nella micro-robotica, un campo che rappresenta una promettente scommessa per il futuro. I microrobot potranno infatti svolgere una serie di funzioni importanti, per esempio per la salute umana, veicolando i farmaci direttamente dove sono necessari, riaprendo vasi sanguigni ostruiti, contribuendo alla chiusura delle ferite e molto altro.
Per fare questo i piccolissimi robot dovranno essere in grado di muoversi con efficienza. “Provate a immaginare di miniaturizzare un dispositivo costituito da leve e ingranaggi: non potrete scendere sotto a una certa dimensione limite. Imitando i tessuti biologici invece ci si può spingere fino alle dimensioni delle cellule, ed è proprio questa la direzione verso la quale la ricerca si sta orientando. Noi in particolare lavoriamo sul movimento e studiamo come certi organismi unicellulari molto efficienti nella locomozione si spostano”.
Nel loro studio De Simone e Arroyo hanno simulato euglenidi con forma e metodi di locomozione diversi, basati principalmente sulla deformazione e il rigonfiamento del corpo, descrivendone nel dettaglio la meccanica e le caratteristiche dello spostamento che si ottiene.
“Il nostro lavoro non solo aiuta a comprendere i meccanismi di locomozione di questi animali unicellulari, ma offre agli ingegneri una base di conoscenze per progettare il sistema di locomozione dei futuri micro-robot”.
Il paper di De Simone e Arroyo è stato selezionato per l’edizione speciale di Journal of the Mechanics and Physics of Solids che festeggia i cinquant’anni di attività della prestigiosa rivista.
Testo redatto su fonte SISSA del 5 dicembre 2013
Image credit: SISSA
© Copyright ADEPRON – Riproduzione riservata